
На бадью действует сила тяжести Q и натяжение каната Т. Следовательно,


Ускорение а определяем из уравнения


Подставляя числовые значения в формулу, получаем

Контрольные вопросы и задания
1. Что называют массой тела? Назовите единицу измерения массы в системе СИ.
2. Что является мерой инертности тела?
3. Запишите основной закон динамики в векторной и дифференциальной форме.
4. На материальную точку действует постоянная сила. Как движется точка?
5.  Какое ускорение получит точка, если на нее действует сила, равная удвоенной силе тяжести?
Какое ускорение получит точка, если на нее действует сила, равная удвоенной силе тяжести?
6. После столкновения двух материальных точек с массами m1 = 6 кг и m2 = 24 кг первая точка получила ускорение 1,6 м/с 2 . Чему равно ускорение, полученное второй точкой?
7. В чем заключается принцип независимости действия сил?
8. Перечислите законы трения скольжения.
9. Перечислите факторы, влияющие на величину коэффициента трения скольжения.
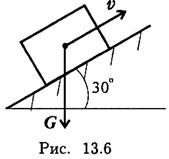
10. Тело движется по наклонной плоскости вверх (рис. 13.6). Масса тела 10 кг, коэффициент трения 0,2. Определите возникающую силу трения.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Сдача сессии и защита диплома – страшная бессонница, которая потом кажется страшным сном. 8908 –  | 7222 –
| 7222 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Автор работы: Пользователь скрыл имя, 26 Февраля 2012 в 10:08, лекция
Краткое описание
В данной лекции рассматриваются следующие вопросы:
Динамика точки.
Основные понятия и определения.
Законы динамики.
Задачи динамики для свободной и несвободной материальной точки.
Дифференциальные уравнения движения точи.
План решения второй задачи движения.
Движение точки, брошенной под углом к горизонту в однородном поле тяжести.
Относительное движение материальной точки.
Влияние вращения Земли на равновесие и движение тел.
Общие теоремы динамики точки.
Количество движения.
Импульс силы.
Теорема об изменении количества движения точки.
Содержимое работы – 1 файл
Динамика точки.docx
Поэтому невозможно установить, наблюдая за движением точки, движется система поступательно, равномерно и прямолинейно или находится в покое. Этот вывод впервые был сделан Г.Галилеем и называется его именем – принцип относительности Галилея.
Пример 7. Вагон движется с постоянным ускорением . Определим траекторию движения предмета М, упавшего с полки высотой h, которую увидит наблюдатель, пассажир, сидящий в вагоне (рис.11).
Порядок решения задачи тот же, что и при определении абсолютного движения. Только оси надо провести по вагону и учесть кроме веса предмета переносную силу инерции (кориолисова сила инерции – переносное движение поступательное).
Дифференциальные уравнения относительного движения получаются такими
Решение этих уравнений
Используя начальные условия (при t = 0: x1 = 0, y1 = h, , т.к. ), найдем постоянные интегрирования: , . Поэтому уравнения движения: Траекторию движения получим, исключив параметр t: Это уравнение прямой (рис. 11). Предмет М упадет на пол вагона на расстоянии от края полки (при ).
Если вагон будет двигаться равномерно (W = 0), то s = 0. Наблюдатель увидит траекторию – вертикальную прямую, такую же, как и при неподвижном вагоне.
Пример 8. Внутри трубки, вращающейся с постоянной угловой скоростью вокруг вертикальной оси, находится шарик М, привязанный нитью длиной а к оси вращения (рис. 12). Определим движение шарика в трубке после того, как нить оборвется. Сопротивление воздуха учитывать не будем.
Траектория движения шарика в трубке – прямая. Поэтому для определения этого движения достаточно одной координаты х1. Начало координат, точка О, – на оси вращения. В промежуточном положении на шарик действуют силы: вес , две составляющие реакции трубки . Добавляем переносную силу инерции кориолисову силу инерции и составляем дифференциальное уравнение движения: Или, после подстановки значения силы инерции и преобразований:
Решение такого дифференциального уравнения, как известно, имеет вид: и . Так как при t = 0 x1 = 0, то С1 +С2 = а, С1 – С2 = 0. Значит и уравнение движения станет таким
Относительная скорость . А т.к. , то
Можно теперь определить относительную скорость шарика в любом положении. Так шарик вылетит из трубки длиной l со скоростью
Влияние вращения Земли на равновесие и движение тел.
При решении большинства технических задач мы считаем систему отсчета, связанную с Землей, неподвижной (инерциальной). Тем самым мы не учитываем суточное вращение Земли и ее движение по орбите вокруг Солнца. Таким образом, считая систему отсчета, связанную с Землей, инерциальной, мы по существу пренебрегаем ее суточным вращением вместе с Землей по отношению к звездам. Это вращение происходит со скоростью: 1 оборот за 23 часа 56 минут 4 секунды, т. е. с угловой скоростью
Исследуем, как сказывается такое довольно медленное вращение на равновесии и движении тел.
1. Относительный покой на поверхности Земли. Сила тяжести. Рассмотрим материальную точку, лежащую на неподвижной относительно Земли гладкой « горизонтальной» плоскости (рис.13). Условие ее равновесия по отношению к Земле состоит в том, что , где – сила притяжения Земли, – реакция плоскости, -переносная сила инерции. Так как , то сила имеет только нормальную составляющую, направленную перпендикулярно к оси вращения Земли. Сложим силы и введем обозначение
Тогда на точку М будут действовать две силы и , уравновешивающие друг друга. Сила и представляет собою ту силу, которую мы называем силой тяжести.
Направление силы будет направлением вертикали в данном пункте поверхности, а плоскость, перпендикулярная к и будет горизонтальной плоскостью. По модулю (r – расстояние точки М от земной оси) и величина малая по сравнению с , так как величина очень мала. Направление силы мало отличается от направления .
При взвешивании тел мы определяем силу , т.к. именно с такой силой тело давит на тело весов. То есть, вводя в уравнения равновесия силу тяжести , мы вводим в них и силу , т.е. фактически учитываем влияние вращения Земли.
Поэтому при составлении уравнений равновесия тел по отношению к Земле никаких поправок на вращение Земли вводить не надо. В этом смысле равновесие по отношению к Земле можно считать абсолютным.
а) Движение по земной поверхности. При движении точки по меридиану в северном полушарии с севера на юг кориолисово ускорение направлено на восток, а сила – на запад. При движении с юга на север сила будет, очевидно, направлена на восток. В обоих случаях, как мы видим, эта сила будет отклонять точку вправо от направления ее движения. Если точка движется по параллели на восток, то ускорение будет направлено вдоль радиуса МС параллели (рис.14), а сила в противоположную сторону. Вертикальная составляющая этой силы (вдоль ОМ) будет несколько изменять вес тела, а горизонтальная составляющая будет направлена к югу и будет отклонять точку тоже вправо от направления движения. Аналогичный результат получим при движении по параллели на запад.
Отсюда заключаем, что в северном полушарии тело, движущееся вдоль земной поверхности по любому направлению будет вследствие вращения Земли отклоняться вправо от направления движения. В южном полушарии отклонение будет происходить влево.
Этим обстоятельством объясняется то, что реки, текущие в северном полушарии, подмывают правый берег (закон Бэра). В этом же причина отклонений ветров постоянного направления (пассаты) и морских течений.
Общие теоремы динамики точки
Для решения многих задач динамики, особенно в динамике системы, вместо метода интегрирования дифференциальных уравнений движения оказывается более удобным пользоваться так называемыми общими теоремами, являющимися следствиями основного закона динамики.
Значение общих теорем состоит в том, что они устанавливают наглядные зависимости между основными динамическими характеристиками движения материальных тел и открывают тем самым новые возможности исследования движений механических систем, широко применяемые в инженерной практике. Кроме того, общие теоремы позволяют изучать отдельные, практически важные стороны данного явления, не изучая явление в целом. Наконец, применение общих теорем избавляет от необходимости проделывать для каждой задачи те операции интегрирования, которые раз и навсегда производятся при выводе этих теорем; тем самым упрощается процесс решения. Сейчас мы рассмотрим, как выглядят эти теоремы для одной материальной точки.
Количество движения точки
Основными динамическими характеристиками движения точки являются количество движения и кинетическая энергия.
Количеством движения точки называется векторная величина m равная произведению массы точки на вектор ее скорости. Направлен вектор т так же, как и скорость точки, т. е. по касательной к ее траектории.
Кинетической энергией (или живой силой) точки называется скалярная величина , равная половине произведения массы точки на квадрат ее скорости.
Необходимость введения двух динамических характеристик объясняется тем, что одной характеристикой нельзя охватить все особенности движения точки.
Например, зная количество движения автомобиля (т.е. величину ) а не величины и в отдельности) и действующую на него при торможении силу, можно определить, через сколько секунд автомобиль остановится, но по этим данным нельзя найти пройденный за время торможения путь. Наоборот, зная начальную кинетическую энергию автомобиля и тормозящую силу, можно определить тормозной путь, но по этим данным нельзя найти время торможения.
Для характеристики действия, оказываемого на тело силой за некоторый промежуток времени, вводится понятие об импульсе силы. Введем сначала понятие об элементарном импульсе, т. е. об импульсе за бесконечно малый промежуток времени dt. Элементарным импульсом силы называйся векторная величина , равная произведению вектора силы на элементарный промежуток времени
Направлен элементарный импульс по линии действия силы.
Импульс любой силы за конечный промежуток времени t1 вычисляется как интегральная сумма соответствующих элементарных импульсов:
Следовательно, импульс силы за любой промежуток времени, равен определенному интегралу от элементарного импульса, взятому в пределах от 0 до .
В частном случае, если сила и по модулю, и по направлению постоянна (=const), будем иметь . Причем, в этом случае и модуль . В общем случае модуль импульса может быть вычислен через его проекции.
Проекции импульса силы на прямоугольные декартовы оси координат равны:
Единицей измерения импульса в СИ является –
Теорема об изменении количества движения точки
Так как масса точки постоянна, а ее ускорение то уравнение, выражающее основной закон динамики, можно представить в виде
Уравнение выражает одновременно теорему об изменении количества движения точки в дифференциальной форме: производная по времени от количества движения точки равна геометрической сумме действующих на точку сил.
Проинтегрируем это уравнение. Пусть точка массы m, движущаяся под действием силы (рис.15), имеет в момент t=0 скорость , а в момент t1-скорость .
Умножим тогда обе части равенства на и возьмем от них определенные интегралы. При этом справа, где интегрирование идет по времени, пределами интегралов будут 0 и t1, а слева, где интегрируется скорость, пределами интеграла будут соответствующие значения скорости и . Так как интеграл от равен , то в результате получим:
Стоящие справа интегралы представляют собою импульсы действующих сил. Поэтому окончательно будем иметь:
Уравнение выражает теорему об изменении количества движения точки в конечном виде: изменение количества движения точки за некоторый промежуток времени равно геометрической сумме импульсов всех действующих на точку сил за тот же промежуток времени (рис. 15).
При решении задач вместо векторного уравнения часто пользуются уравнениями в проекциях.
В случае прямолинейного движения, происходящего вдоль оси Ох теорема выражается первым из этих уравнений.
Вопросы для самопроверки
– Сформулируйте основные законы механики.
– Какое уравнение называется основным уравнением динамики?
– Какова мера инертности твердых тел при поступательном движении?
– Зависит ли вес тела от местонахождения тела на Земле?
– Какую систему отсчета называют инерциальной?
– К какому телу приложена сила инерции материальной точки и каковы ее модуль и направление?
– Объясните разницу между понятиями «инертность» и « сила инерции»?
– К каким телам приложена сила инерции, как направлена и по какой формуле может быть рассчитана?
– В чем заключается принцип кинетостатики?
– Каковы модули и направления касательной и нормальной сил инерции материальной точки?
– Что называют массой тела? Назовите единицу измерения массы в системе СИ?
– Что является мерой инертности тела?
– Запишите основной закон динамики в векторной и дифференциальной форме?
– На материальную точку действует постоянная сила. Как движется точка?
– Какое ускорение получит точка, если на нее действует сила, равная удвоенной силе тяжести?
– После столкновения двух материальных точек с массами m1=6 кг и m2=24 кг первая точка получила ускорение 1,6 м/с. Чему равно ускорение, полученное второй точкой?
– При каком движении материальной точки равна нулю ее касательная сила инерции и при каком – нормальная?
– По каким формулам вычисляются модули вращательной и центробежной сил инерции точки, принадлежащей твердому телу, вращающемуся вокруг неподвижной оси?
– Как формулируется основной закон динамики точки?
– Приведите формулировку закона независимости действия сил.
– Запишите дифференциальные уравнения движения материальной точки в векторной и координатной форме.
– Сформулируйте сущность первой и второй основных задач динамики точки.
– Приведите условия, из которых определяются постоянные интегрирования дифференциальных уравнений движения материальной точки.
– Какие уравнения динамики называются естественными уравнениями движения материальной точки?
– Каковы две основные задачи динамики точки, которые решаются с помощью дифференциальных движений материальной точки?
– Дифференциальные уравнения движения свободной материальной точки.
– Как определяются постоянные при интегрировании дифференциальных уравнений движения материальной точки?
– Определение значений произвольных постоянных, появляющихся при интегрировании дифференциальных уравнений движения материальной точки.
Закон сохранения импульса
Начну с пары определений, без знания которых дальнейшее рассмотрение вопроса будет бессмысленным.
Сопротивление, которое оказывает тело при попытке привести его в движение или изменить его скорость, называется инертностью.
Мера инертности – масса.
Таким образом можно сделать следующие выводы:
- Чем больше масса тела, тем большее оно оказывает сопротивление силам, которые пытаются вывести его из состояния покоя.
- Чем больше масса тела, тем большее оно оказывает сопротивление силам, которые пытаются изменить его скорость в случае, если тело движется равномерно.
Резюмируя можно сказать, что инертность тела противодействует попыткам придать телу ускорение. А масса служит показателем уровня инертности. Чем больше масса, тем большую силу нужно применить для воздействия на тело, чтобы придать ему ускорение.
Замкнутая система (изолированная) – система тел, на которую не оказывают влияние другие тела не входящие в эту систему. Тела в такой системе взаимодействуют только между собой.
Если хотя бы одно из двух условий выше не выполняется, то систему замкнутой назвать нельзя. Пусть есть система, состоящая из двух материальных точек, обладающими скоростями  и
и  соответственно. Представим, что между точками произошло взаимодействие, в результате которого скорости точек изменились. Обозначим через
соответственно. Представим, что между точками произошло взаимодействие, в результате которого скорости точек изменились. Обозначим через  и
и  приращения этих скоростей за время взаимодействия между точками
приращения этих скоростей за время взаимодействия между точками  . Будем считать, что приращения имеют противоположные направления и связаны соотношением
. Будем считать, что приращения имеют противоположные направления и связаны соотношением  . Мы знаем, что коэффициенты
. Мы знаем, что коэффициенты  и
и  не зависят от характера взаимодействия материальных точек — это подтверждено множеством экспериментов. Коэффициенты и являются характеристиками самих точек. Эти коэффициенты называются массами (инертными массами). Приведенное соотношения для приращения скоростей и масс можно описать следующим образом.
не зависят от характера взаимодействия материальных точек — это подтверждено множеством экспериментов. Коэффициенты и являются характеристиками самих точек. Эти коэффициенты называются массами (инертными массами). Приведенное соотношения для приращения скоростей и масс можно описать следующим образом.
Отношение масс двух материальных точек равно отношению приращений скоростей этих материальных точек в результате взаимодействия между ними.
Представленное выше соотношение можно представить в другом виде. Обозначим скорости тел до взаимодействия как  и
и  соответственно, а после взаимодействия —
соответственно, а после взаимодействия —  и
и  . В этом случае приращения скоростей могут быть представлены в таком виде —
. В этом случае приращения скоростей могут быть представлены в таком виде —  и
и  . Следовательно, соотношение можно записать так —
. Следовательно, соотношение можно записать так —  .
.
Импульс (количество энергии материальной точки) – вектор равный произведению массы материальной точки на вектор ее скорости —

Импульс системы (количество движения системы материальных точек) – векторная сумма импульсов материальных точек, из которых эта система состоит —
.
Можно сделать вывод, что в случае замкнутой системы импульс до и после взаимодействия материальных точек должен остаться тем же —  , где
, где  и
и  . Можно сформулировать закон закон сохранения импульса.
. Можно сформулировать закон закон сохранения импульса.
Импульс изолированной системы остается постоянным во времени, независимо от взаимодействия между ними.
Закон сохранения энергии
Консервативные силы – силы, работа которых не зависит от траектории, а обусловлена только начальными и конечными координатами точки.
Формулировка закона сохранения энергии:
В системе, в которой действуют только консервативные силы, полная энергия системы остается неизменной. Возможны лишь превращения потенциальной энергии в кинетическую и обратно.
Потенциальная энергия материальной точки является функцией только координат этой точки. Т.е. потенциальная энергия зависит от положения точки в системе. Таким образом силы  , действующие на точку, можно определить так: можно определить так:
, действующие на точку, можно определить так: можно определить так:  .
.  – потенциальная энергия материальной точки.
– потенциальная энергия материальной точки.  Помножим обе части на
Помножим обе части на  и получим
и получим  . Преобразуем и получим выражение доказывающее закон сохранения энергии.
. Преобразуем и получим выражение доказывающее закон сохранения энергии. 
Упругие и неупругие столкновения
Абсолютно неупругий удар – столкновение двух тел, в результате которого они соединяются и далее двигаются как одно целое.
Два шара  ,
,  с
с  и
и  испытывают абсолютно неупругий дар друг с другом. По закону сохранения импульса
испытывают абсолютно неупругий дар друг с другом. По закону сохранения импульса  . Отсюда можно выразить скорость двух шаров, двигающихся после соударения как единое целое —
. Отсюда можно выразить скорость двух шаров, двигающихся после соударения как единое целое —  . Кинетические энергии до и после удара:
. Кинетические энергии до и после удара:  и
и  . Найдем разность
. Найдем разность
 ,
,
где  – приведенная масса шаров. Отсюда видно, что при абсолютно неупругом столкновении двух шаров происходит потеря кинетической энергии макроскопического движения. Эта потеря равна половине произведения приведенной массы на квадрат относительной скорости.
– приведенная масса шаров. Отсюда видно, что при абсолютно неупругом столкновении двух шаров происходит потеря кинетической энергии макроскопического движения. Эта потеря равна половине произведения приведенной массы на квадрат относительной скорости.
Абсолютно упругий удар – столкновение двух тел, в результате которого механическая энергия системы остается прежней.
Два шара  ,
,  с
с  и
и  до соударения и
до соударения и  и
и  после. По закону сохранения импульса и энергии:
после. По закону сохранения импульса и энергии:  ,
,  . Решением системы может стать
. Решением системы может стать  и
и  . Это значит, что шары не встретились. Потребуем
. Это значит, что шары не встретились. Потребуем  и
и  и перепишем уравнения в виде:
и перепишем уравнения в виде:  ,
,  . Второе уравнение делим почленно на первое и получаем
. Второе уравнение делим почленно на первое и получаем  . Решаем систему из двух линейных уравнений и имеем:
. Решаем систему из двух линейных уравнений и имеем:  ,
,  .
.